Robot Control using Raspberry Pi
Lecture 1 - AWS Academy and Virtulaztion using Docker
Li Bai 
Temple University
September 9, 2023
Mangdang
A quadruped robot dog originated from a stanford project click here
- A Mangdang v2 and a raspberry pi 4 2GB
- Better own two 32GB micro SD cards

- software development is done using AWS Robomaker and AWS Cloud 9
- Virtualization, Docker, Linux, Python 3
- Robot Operating System (ROS) and Gazebo
- ReInvent Workshop 2022 for Dance Robot (Gan and Hansen 2022)
AWS RoboMaker Workflow
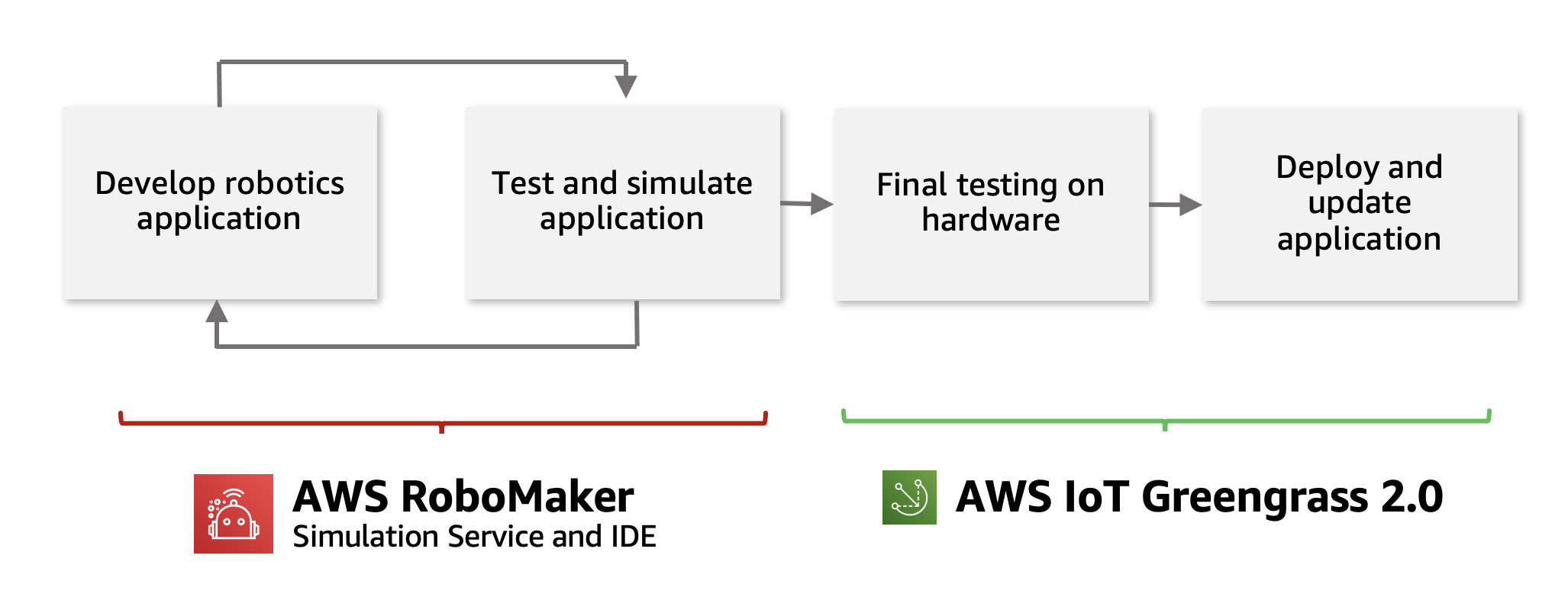
Note
- Simulation in Robomaker (or DCV) using Gazebo (simulation_ws)
- Deployment using IoT Greengrass 2.0 (robot_ws)
- Docker container registry (contain OS integrity)
- Cloud storage (S3 - Simple Storage Services)
AWS Greengrass Deployment Process
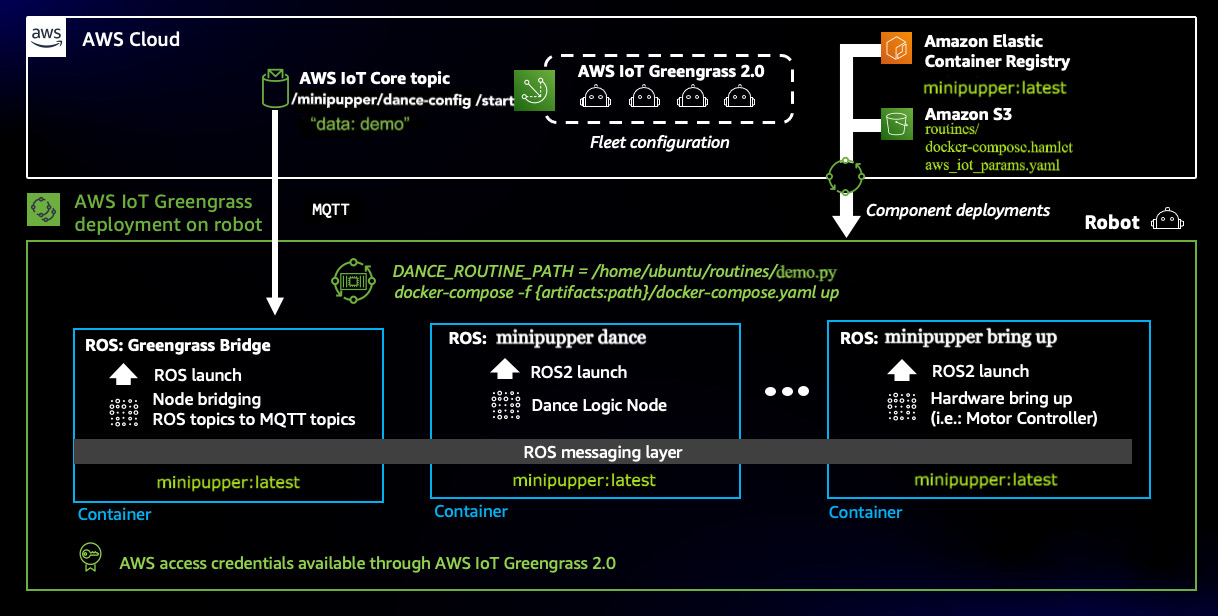
Note
- container can run a complete different OS than robot OS (x86 and arm64)
- container deployed from AWS ECR
- message call from MQTT bridge
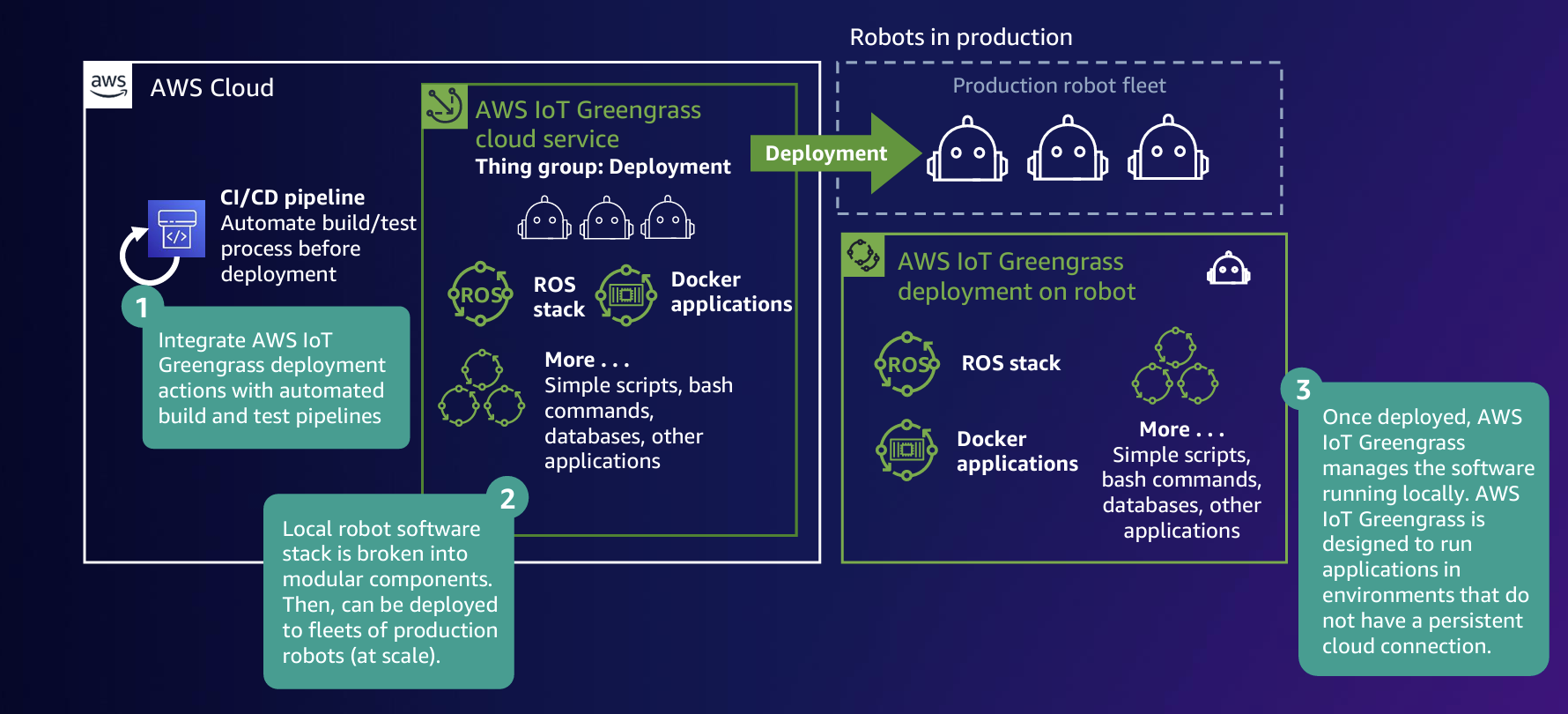
AWS Robot Deployment
AWS Academy
Elastic Computing using AWS Academy
Canvas shell
- You get a canvas page (not the same as Temple’s Canvas) AWS Academy on Chrome
- multi-course tiles - create a nickname in the console
- Manage your cloud instance for a course -learner lab
- start lab/end lab, $100 credit
![]()
- After you start the lab, click on the green dot for AWS Console


AWS Console Management
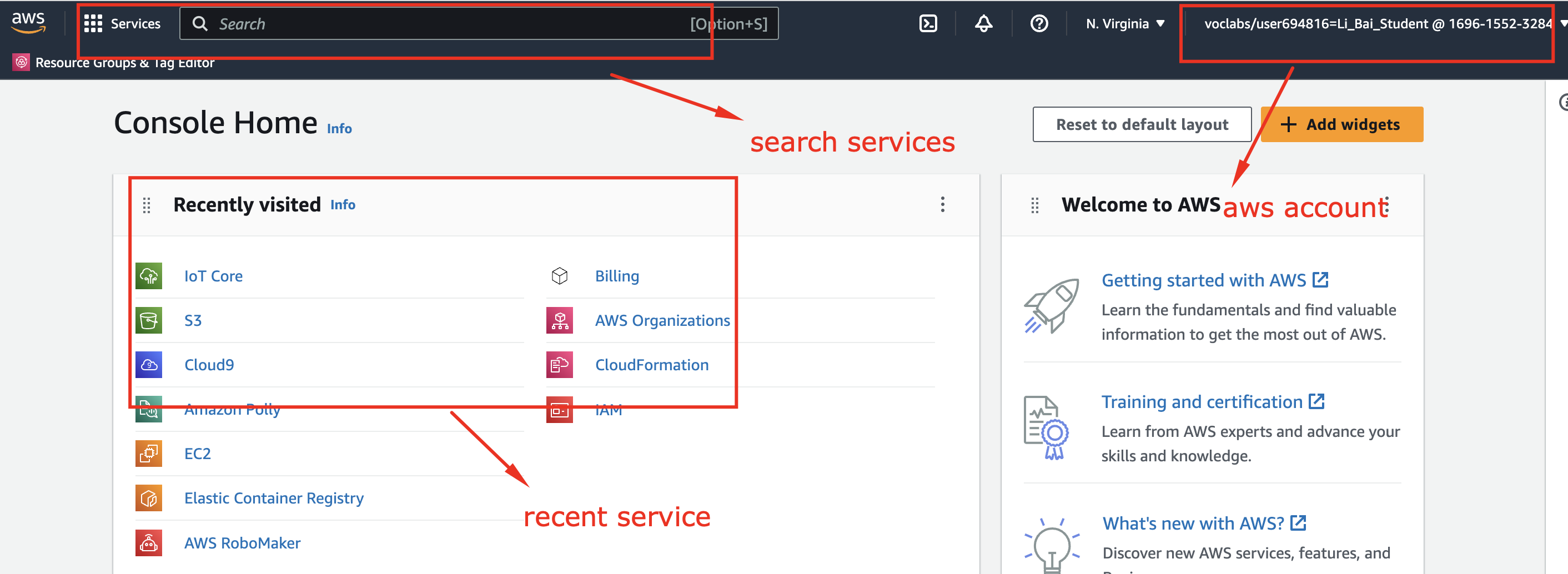
- search for services
- recent services
- account or role information
Note
The remote desktop using NICE DCV can be fragile in Firefox, Safari and Edge - please use Google Chrome.
1. Cloud 9 - virtual instance,
2. IAM - user management, role, policy
3. Simple Storage Service (S3)
4. robomaker, etc.AWS Academy
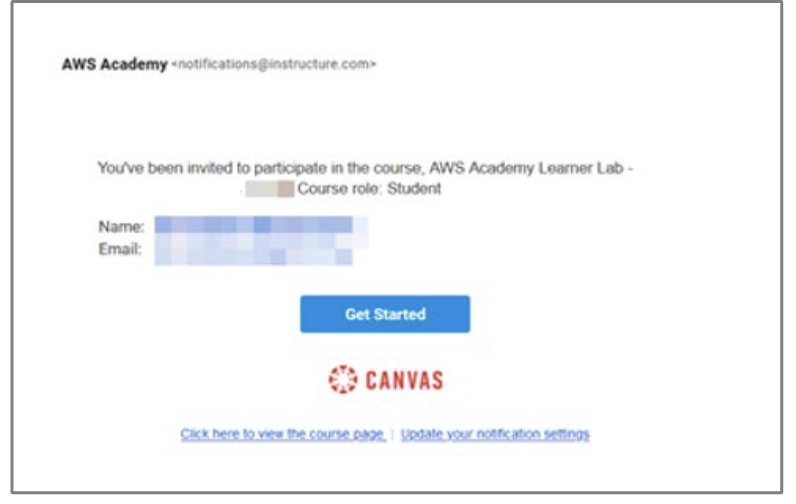
AWS Academy Account Setup
- Check an email from AWS Academy
![]()
- Follow the instruction at to setup an account which is different than your University’s account
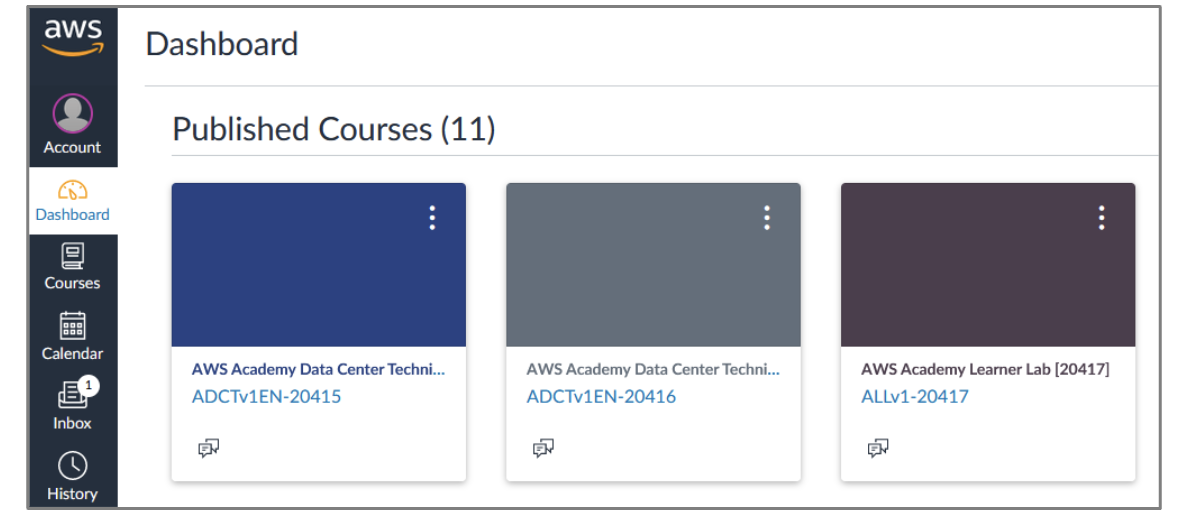
You should have access to AWS Canvas Console.
![]()
Better rename a nickname by clicking on ⋮ of the course tile
Setup AWS Cloud 9 …
Requirements for instance setup
Need create an EC2 instance
- create a new environment
![]()
- New EC2 instance
- c4.xlarge, ubuntu 22.04, Secure Shell (SSH)
Cloud 9
Select EC2 Instance
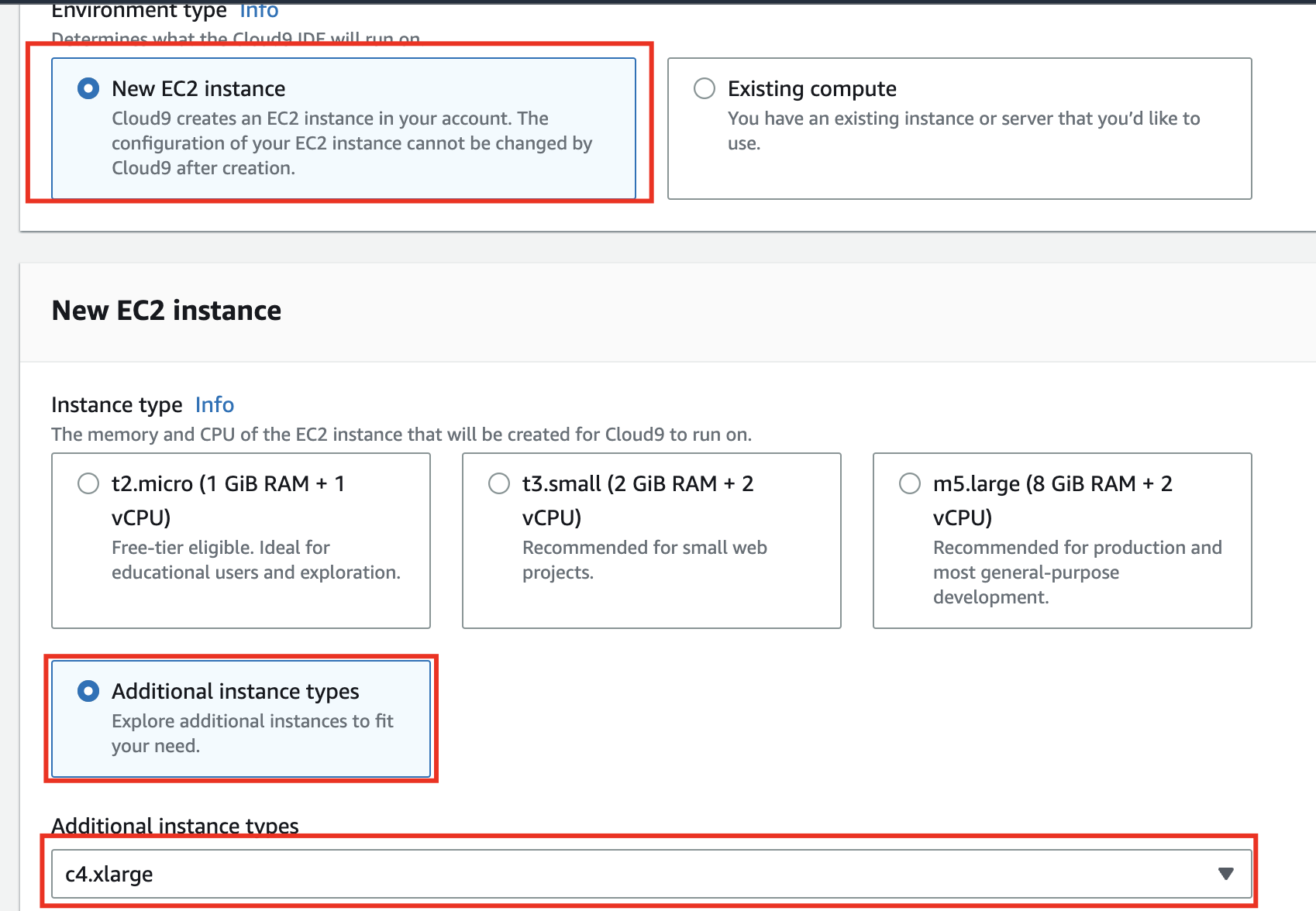
- c4.xlarge (7.5GB and 4 vCPU)
Cloud 9
Select EC2 OS
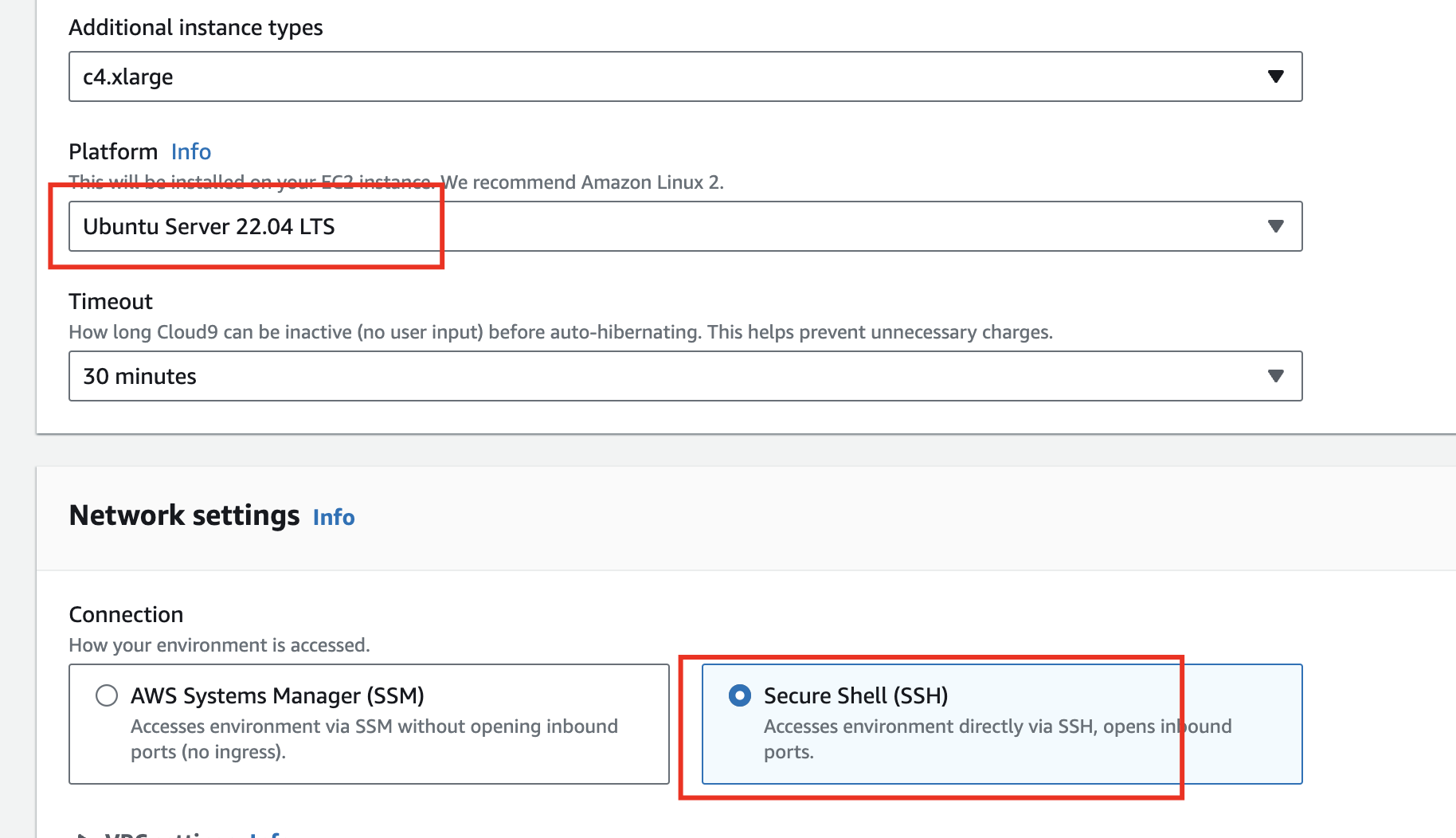
- Ubuntu 22.04 (Jammy)
Cloud 9
Create OS
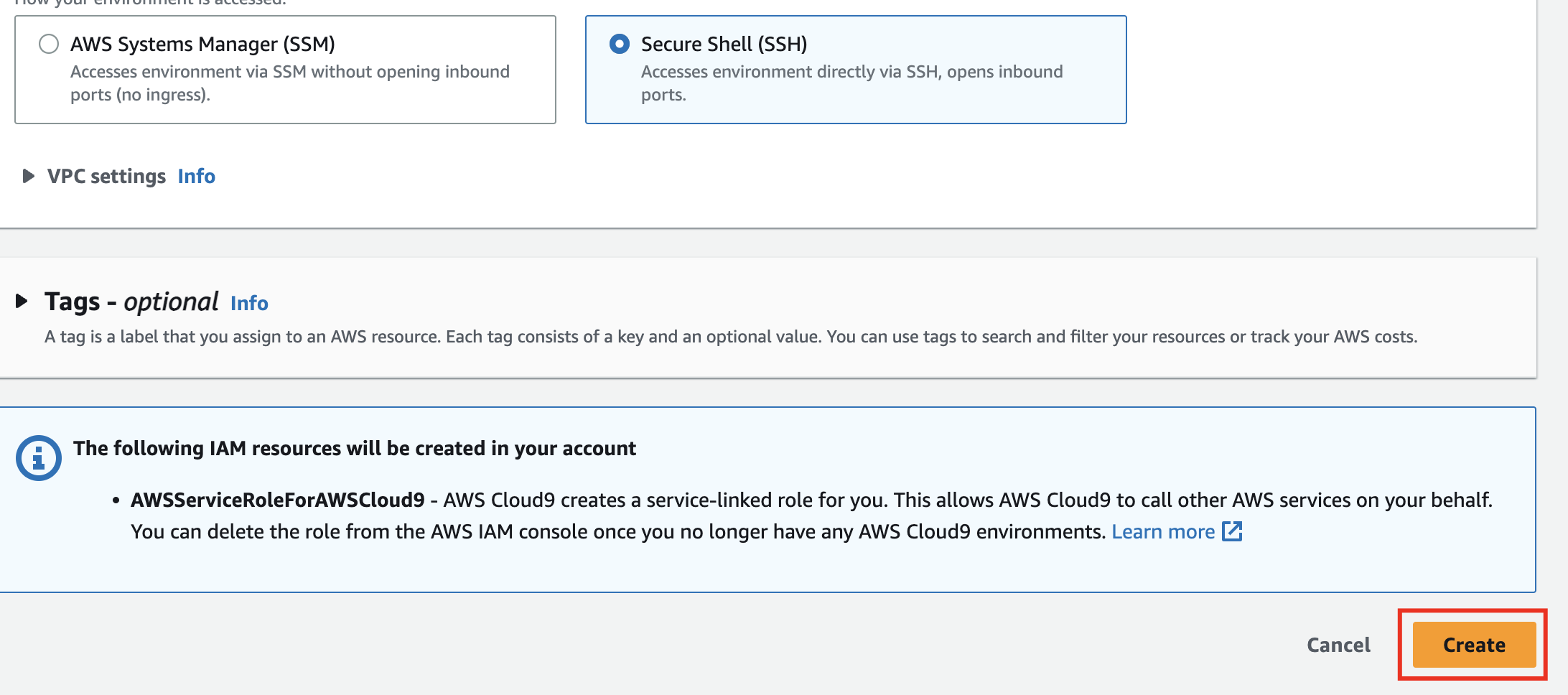
Cloud 9
Open/Create Cloud 9
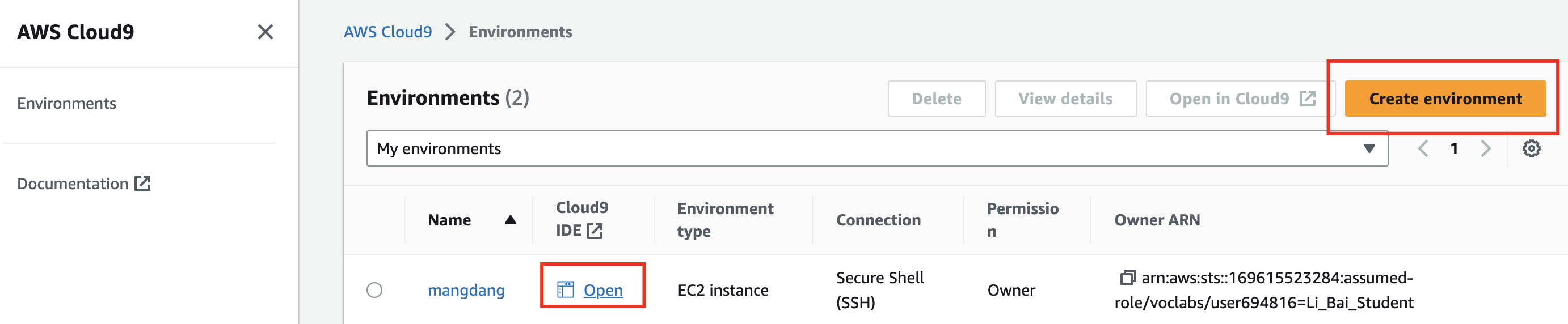
- click open to access cloud 9
- add other cloud 9 instance by clicking on create environment
- make sure you do not have a lot instances becasue they run when you start the lab
Cloud 9 IDE
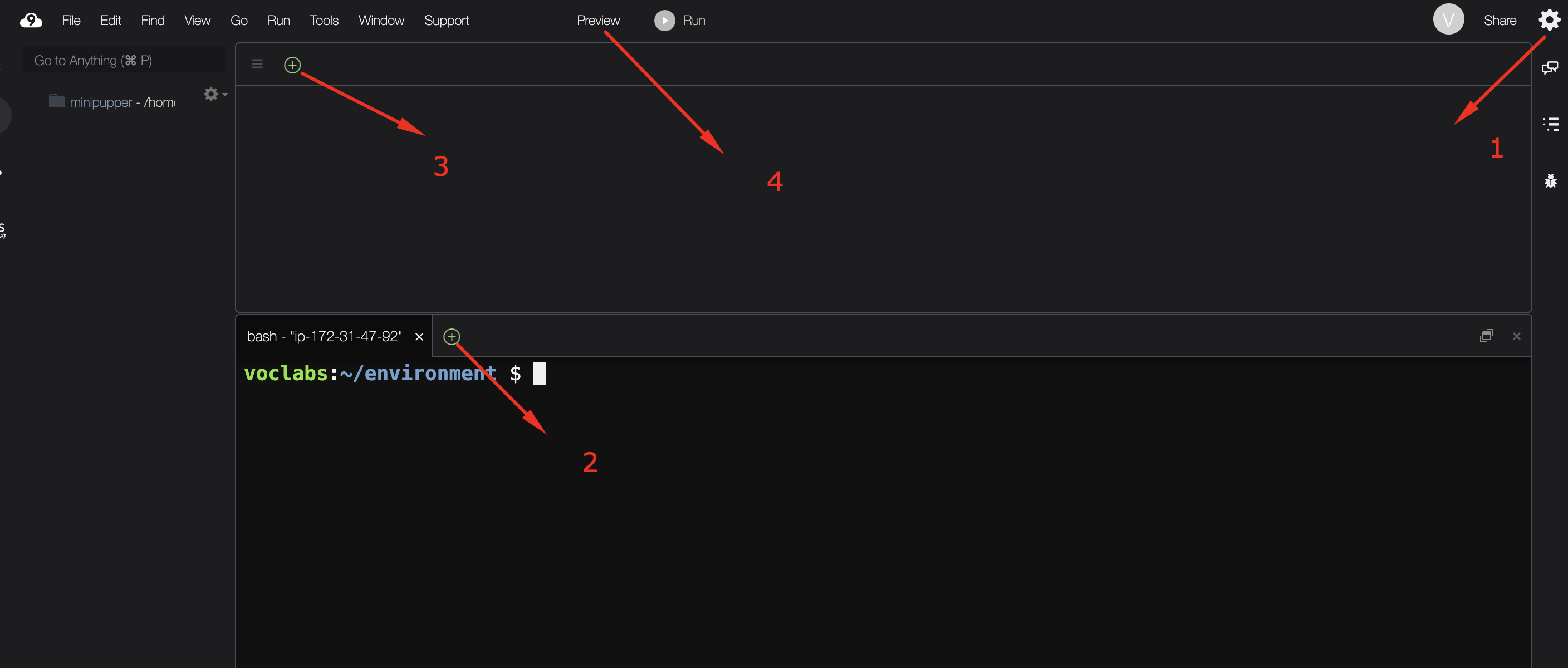
Access DCV from cloud 9
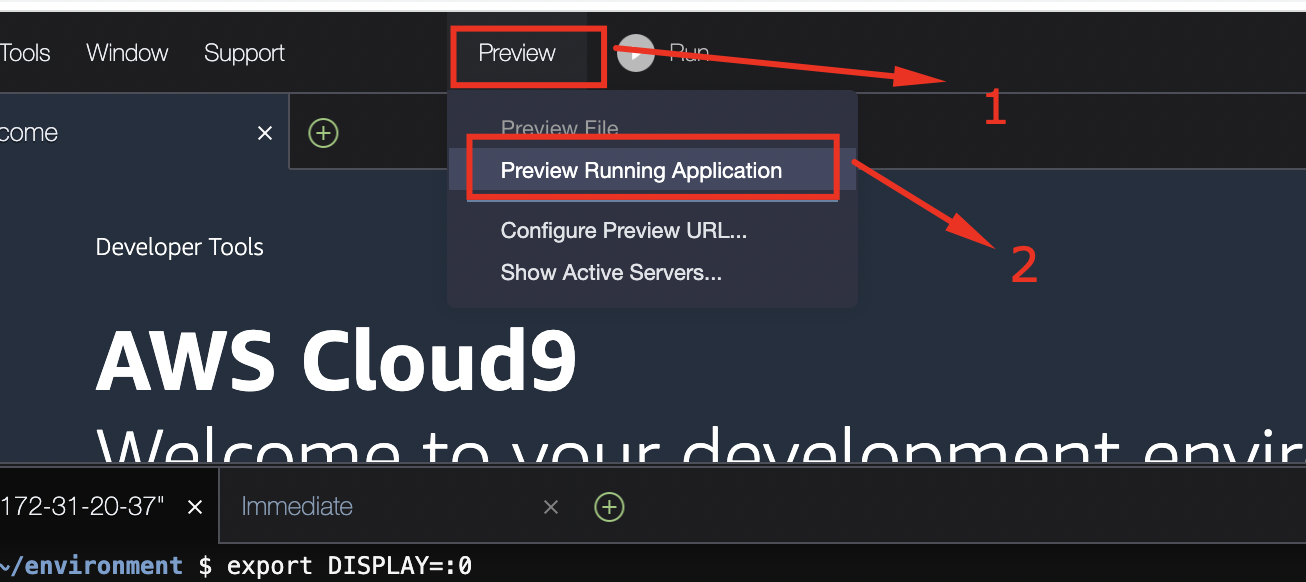
- check the menu bar
- click on preview application
- click on preview running application
![]() - click on the expansion icon to open a new tab
- click on the expansion icon to open a new tab
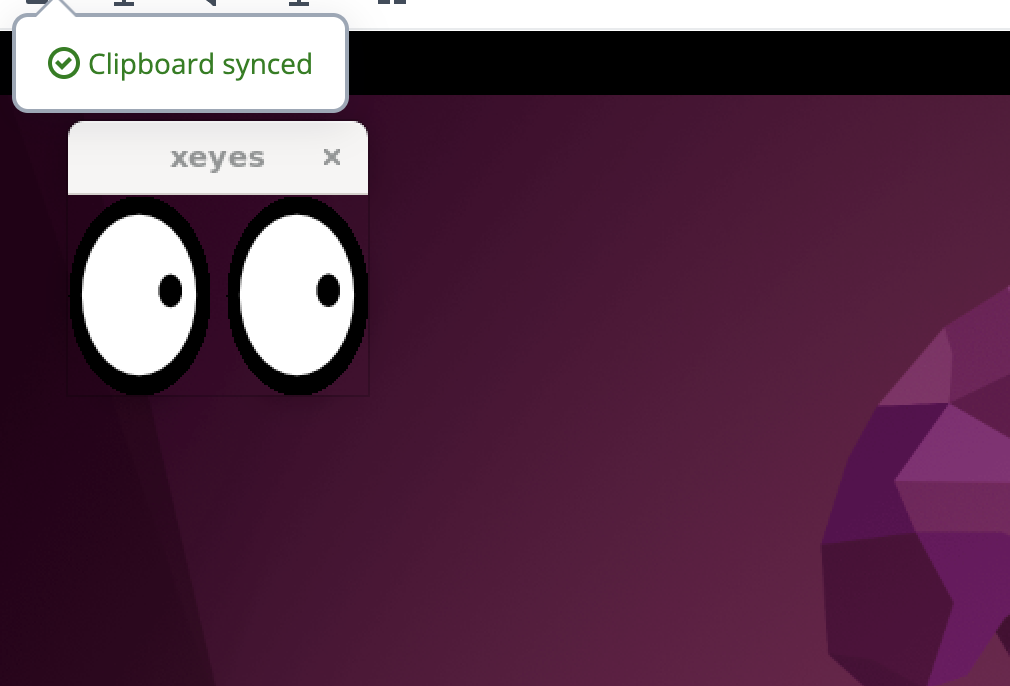
XWindow from DCV
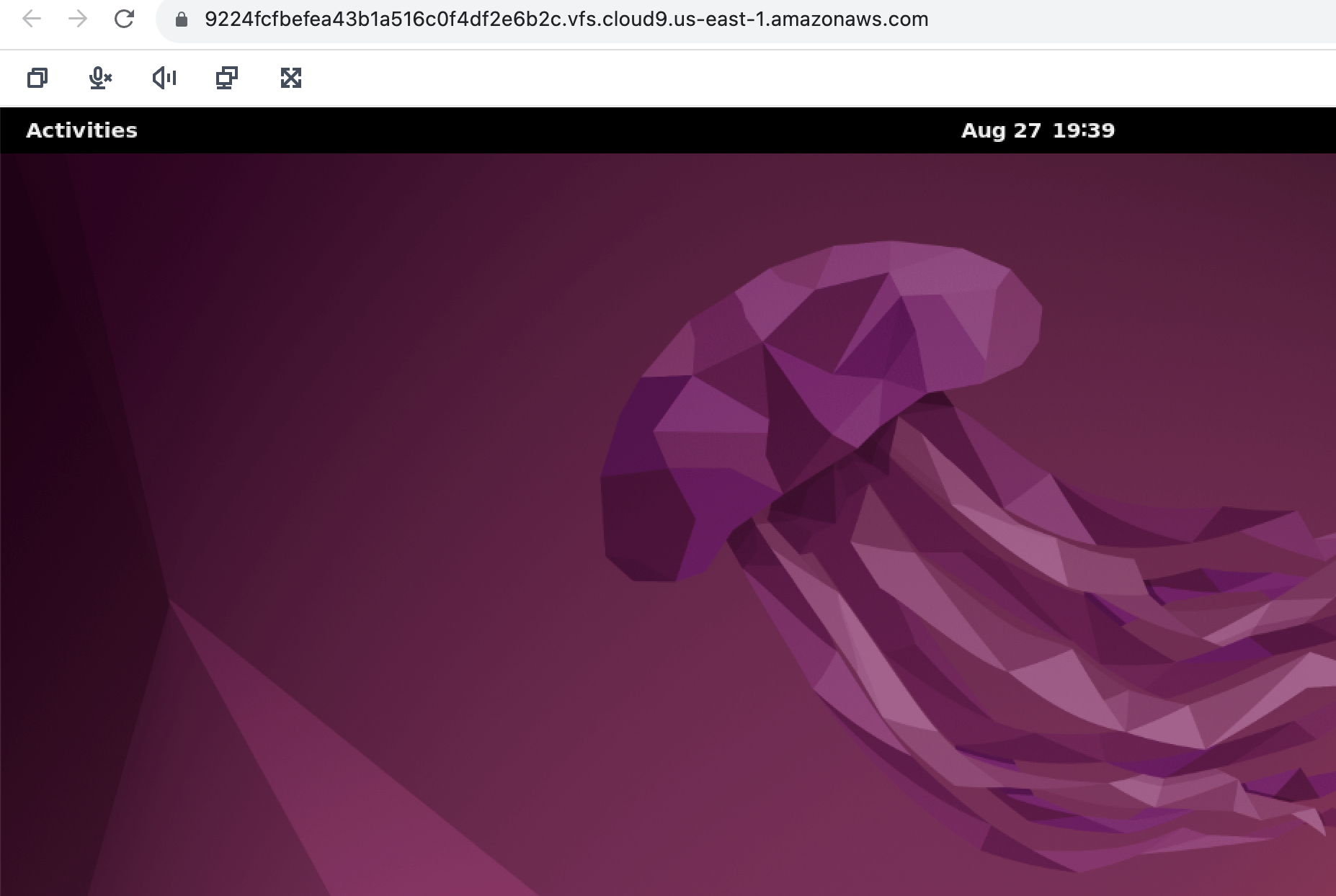
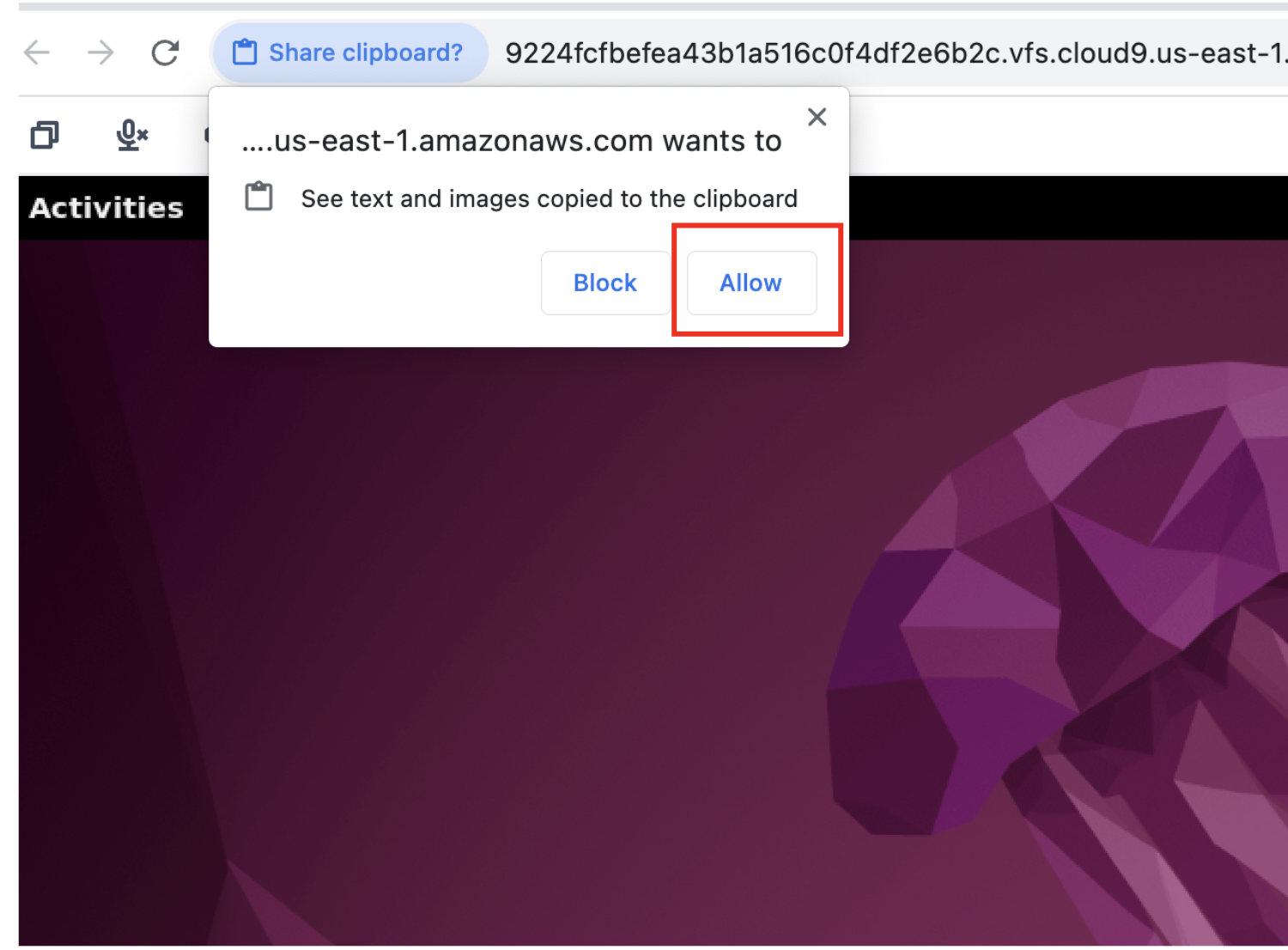
Allow XWindow on Browser
DCV from running xeyes application
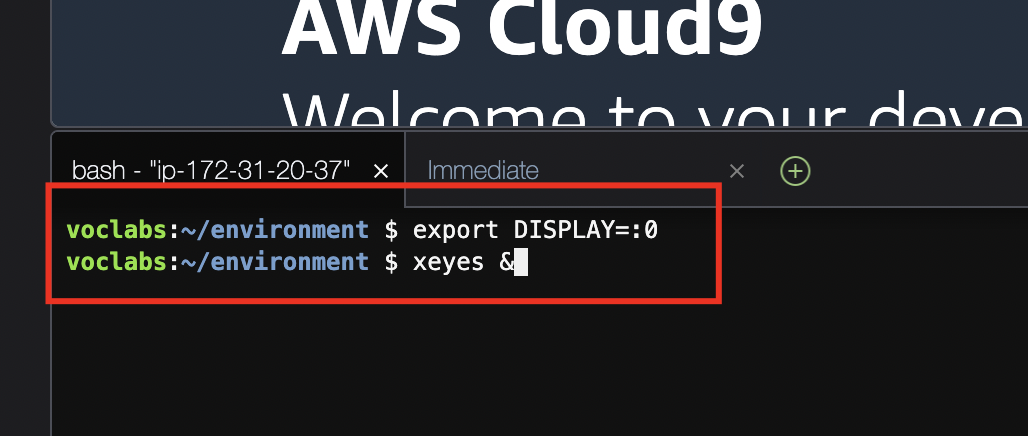
Xeyes Application in the browser window
Docker
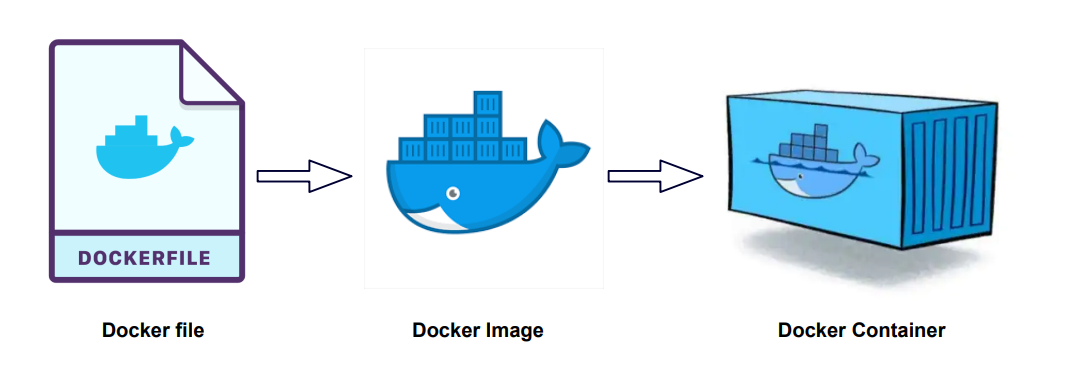
Docker Installation
sudo apt update
sudo apt install -y apt-transport-https ca-certificates curl software-properties-common
curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo apt-key add -
sudo add-apt-repository "deb [arch=amd64] https://download.docker.com/linux/ubuntu focal stable"
sudo apt install docker.io -y
sudo usermod -aG docker $USER
sudo reboot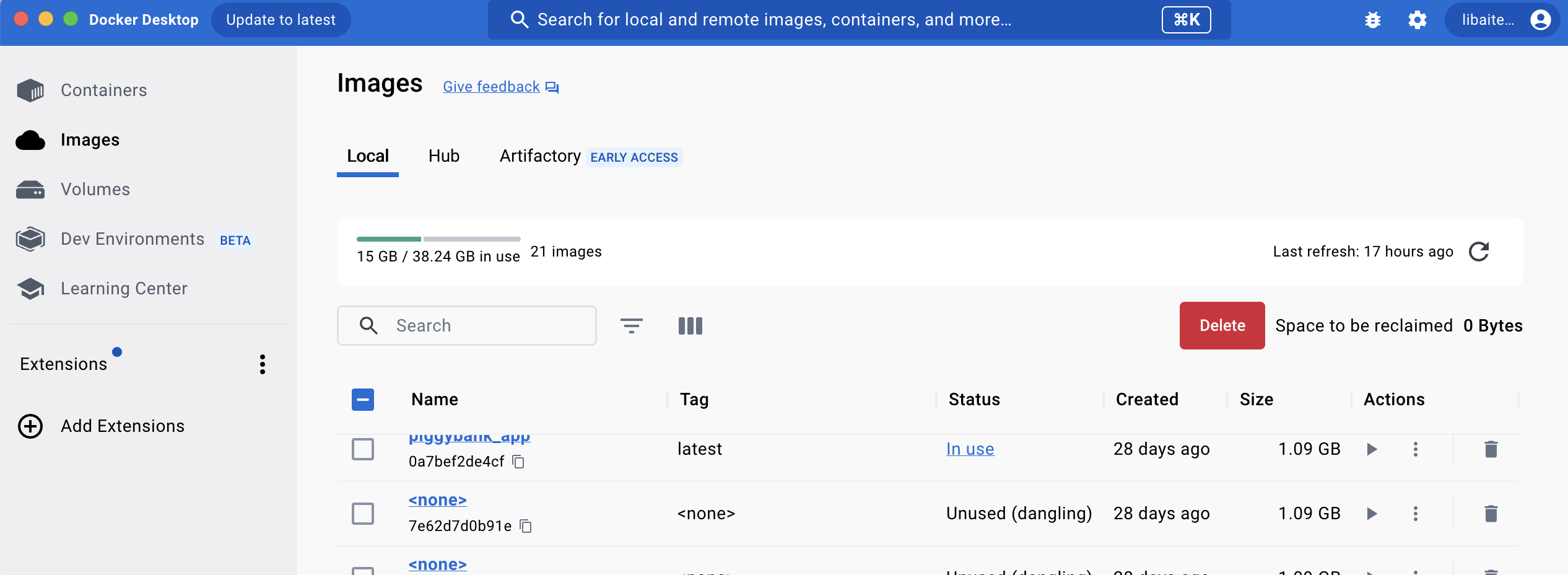
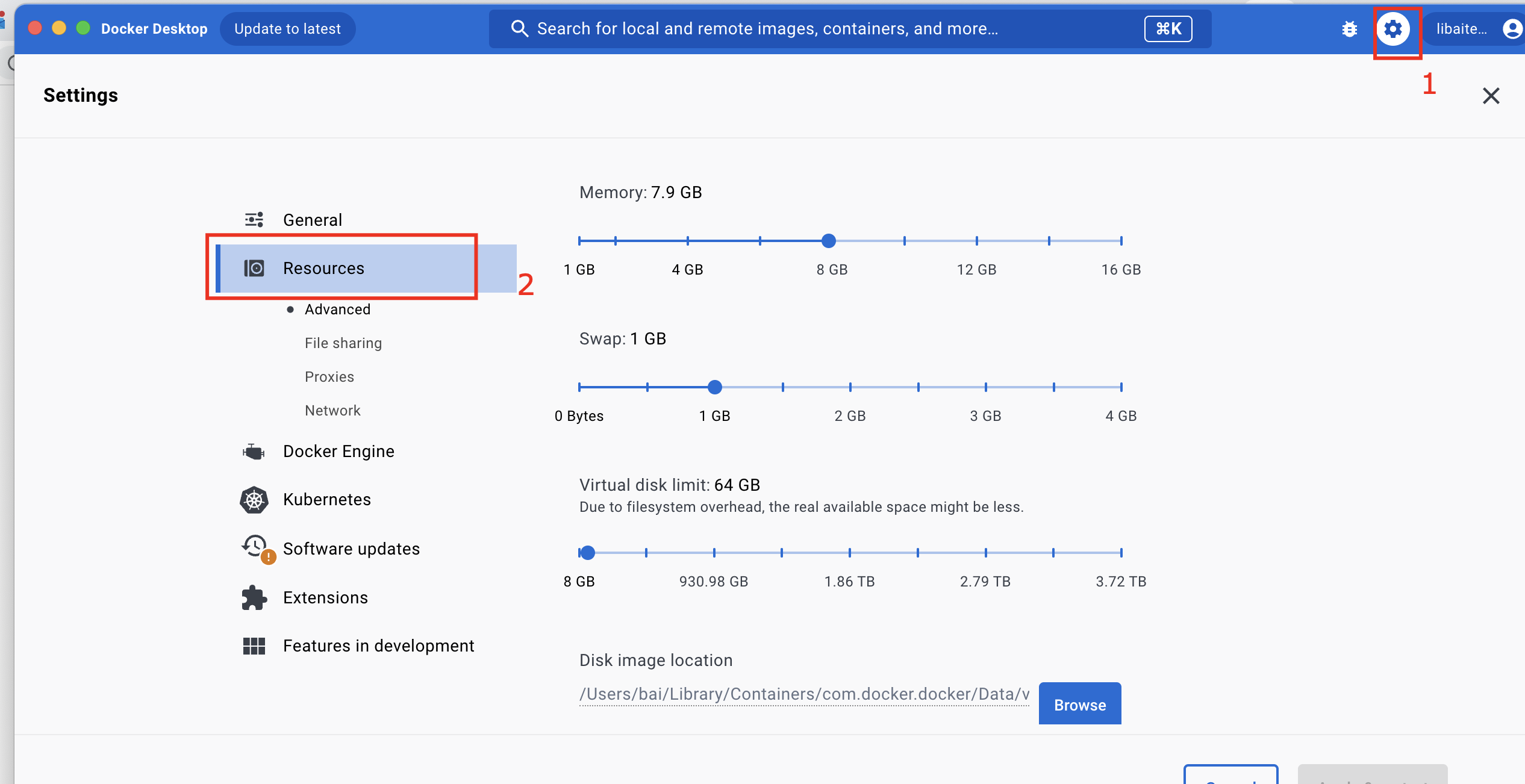
Download here - download based on your processor
If you need to update your kernel, try to type the following command in your command window
References
Gan, Afreez, and Li Bai. 2022. “MiniPupper AWS - ROS1.” 2022. https://github.com/lbaitemple/mini-pupper-aws.
Gan, Afreez, and Matt Hansen. 2022. “Dance of the Cloud Connected Robots.” 2022. https://catalog.us-east-1.prod.workshops.aws/workshops/511d7599-73bd-4142-bd6b-fa83dbe3d8ce/en-US.
Robots, Building Cloud Connected. 2021. “Building Cloud Connected Robots.” 2021. https://catalog.us-east-1.prod.workshops.aws/workshops/fa208b8e-83d6-4cc1-8356-bfa5b6184fae/en-US.